<del id="aymay"></del> 腹腔鏡手術(shù)是一類(lèi)外科手術(shù),在手術(shù)過(guò)程中將一個(gè)長(zhǎng)柄器械通過(guò)小切口插入患者體內(nèi)需要?jiǎng)邮中g(shù)的目標(biāo)部位。與傳統(tǒng)的開(kāi)放式手術(shù)相比,腹腔鏡手術(shù)能縮短恢復(fù)時(shí)間、痛苦小、粘連少,使病人在術(shù)后能擁有更好的生活質(zhì)量。但是,手動(dòng)腹腔鏡手術(shù)存在很多局限,包括不能感知深度、對(duì)相機(jī)的控制不強(qiáng)、儀器尖端能自由轉(zhuǎn)動(dòng)的角度和空間有限、醫(yī)生手術(shù)器械能活動(dòng)的幅度也受局限。這些局限會(huì)導(dǎo)致外科醫(yī)生在手術(shù)過(guò)程中要忍受不自然和痛苦的手術(shù)姿勢(shì),從而容易疲勞。
機(jī)器人輔助腹腔鏡手術(shù),如達(dá)芬奇系統(tǒng),能讓外科醫(yī)生坐鎮(zhèn)立體聲控制臺(tái)通過(guò)患者床邊的機(jī)器手臂實(shí)現(xiàn)對(duì)內(nèi)窺鏡手術(shù)器械的遠(yuǎn)程控制。達(dá)芬奇系統(tǒng)由三個(gè)部分組成:外科醫(yī)生主控制臺(tái)、病人床邊用于放置手術(shù)器械的手術(shù)推車(chē)和成像處理設(shè)備。該系統(tǒng)的三維可視化功能可提供深度感知,而其類(lèi)似手腕狀關(guān)節(jié)的微型化手術(shù)器械提高了外科醫(yī)生的靈活度和運(yùn)動(dòng)范圍。該系統(tǒng)還通過(guò)減少手的抖動(dòng)和把外科醫(yī)生的動(dòng)作經(jīng)系統(tǒng)處理之后按比例提供給機(jī)械手臂來(lái)加強(qiáng)(對(duì)手術(shù)精度的)控制。相比醫(yī)生手動(dòng)的腹腔鏡手術(shù),符合人體工程學(xué)的儀表-手-眼結(jié)合和直觀的器械動(dòng)作還可以縮短外科醫(yī)生的訓(xùn)練時(shí)間。

圖中所示的達(dá)芬奇高清外科手術(shù)系統(tǒng)(da Vinci Si HD Surgical System)配置有兩個(gè)外科醫(yī)生主控制臺(tái)、一臺(tái)病人手術(shù)推車(chē)和一臺(tái)用于放置顯示手術(shù)過(guò)程成像設(shè)備推車(chē)。
達(dá)芬奇機(jī)器人手術(shù)系統(tǒng)以麻省理工學(xué)院(原名斯坦福研究學(xué)院)研發(fā)的機(jī)器人外科手術(shù)技術(shù)為基礎(chǔ)。Intuitive Surgical隨后與IBM、麻省理工學(xué)院和Heartport公司聯(lián)手對(duì)該系統(tǒng)進(jìn)行了進(jìn)一步開(kāi)發(fā)。 FDA已經(jīng)批準(zhǔn)將達(dá)芬奇機(jī)器人手術(shù)系統(tǒng)用于成人和兒童的普通外科、胸外科、泌尿外科、婦產(chǎn)科、頭頸外科以及心臟手術(shù)。
達(dá)芬奇機(jī)器人
達(dá)芬奇外科手術(shù)系統(tǒng)要求在病人身體開(kāi)多達(dá)五個(gè)小型(小于1厘米)的切口,用于插入兩個(gè)手術(shù)機(jī)械手臂和一個(gè)攝像頭。放置在病人床邊的配套推車(chē)將手術(shù)器械移動(dòng)到病人身邊,病人床邊會(huì)有外科手術(shù)助手在。與此同時(shí),醫(yī)生可以坐到房間的控制臺(tái)來(lái)操作系統(tǒng),外科醫(yī)生的所見(jiàn)和感受與開(kāi)放式手術(shù)是相同的。外科醫(yī)生通過(guò)對(duì)主控裝置(用于將外科醫(yī)生的動(dòng)作翻譯并傳遞給機(jī)械手臂)進(jìn)行操縱來(lái)進(jìn)行手術(shù)。外科醫(yī)生用手抓住顯示屏下方的主控裝置,手腕相對(duì)其眼睛自然地動(dòng)作。外科醫(yī)生的對(duì)主控裝置的動(dòng)作被轉(zhuǎn)換成在患者體內(nèi)進(jìn)行的精確的、實(shí)時(shí)的機(jī)器手臂動(dòng)作。
通過(guò)外科醫(yī)生的手腕、手和手指的運(yùn)動(dòng)來(lái)控制主刀的機(jī)器手臂,這和典型的開(kāi)放式手術(shù)是一樣的。此外,該系統(tǒng)還有一系列全套的EndoWrist手術(shù)器械可供選擇。這些手術(shù)器械可以做7度角的旋轉(zhuǎn),超出了人類(lèi)手腕的靈巧度。每一類(lèi)手術(shù)器械都有特定的作用,如用于夾緊,縫合手術(shù)和組織處理。
病人旁邊的推車(chē)用于容納兩個(gè)機(jī)器人手臂和一個(gè)內(nèi)窺鏡手臂,它們用來(lái)復(fù)制外科醫(yī)生的動(dòng)作。腹腔鏡手臂以手術(shù)部位作為支樞,不用依靠患者的體腔壁來(lái)做支撐,這樣就將把對(duì)組織和神經(jīng)的損傷降到了最低程度。外科醫(yī)生的助手們安全好合適的手術(shù)器械,在患者身上準(zhǔn)備合適的切口,并監(jiān)管腹腔鏡機(jī)械手臂和正在使用的工具。
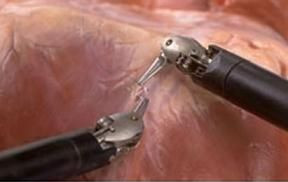

在上面的圖片中,EndoWrist制動(dòng)器正在進(jìn)行縫合操作。在下面的圖片中,外科醫(yī)生正在對(duì)主控制臺(tái)的主控裝置進(jìn)行操作以引導(dǎo)EndoWrist制動(dòng)器。




