<del id="aymay"></del> 前言:現(xiàn)今工業(yè)機器人主要分兩大類——直角坐標機器人和關節(jié)機器人,這兩類機器人均適合用于諸多工業(yè)領域的機械自動化作業(yè),比如,自動裝配、噴漆、搬運碼垛、焊接等工作。沈陽萊機機電多年從事機器人事業(yè),本文是結合沈陽萊茵機電的經(jīng)驗及知識來主要介紹直角坐標機器人和關節(jié)機器人的特性,以及兩種機器人的應用對比。這些對比分析來自我們的經(jīng)驗及認識,有其局限性,不充分,僅供朋友們參考。
一、直角坐標機器人
1、概念:
基于空間XYZ直角坐標系編程、有三軸及以上自由度,能夠?qū)崿F(xiàn)自動控制、可重復編程反復應用,適合不同任務的自動化設備。
它能夠搬運物體、操作工具,以完成各種作業(yè)。關于機器人的定義隨著科技的不斷發(fā)展,在不斷的完善,直角坐標機器人作為機器人的一種,其含義也在不斷的完善中。
1)任意組合成各種樣式,形成兩軸到六軸不同結構形式。
2) 超大行程:單根最多長度是6米,但可以多根方便地級連成超大行程,例如50米長。
3)負載能力強:通常是到200公斤,但當采用多根多滑塊結構時其負載能力可增加到數(shù)噸。
4)高動態(tài)特性:輕負載時其最高運行速度每秒8米,加速度每秒5米。
5)高精度:重復定位精度可達到0.05mm~0.01mm。
6)擴展能力強:可以方便改變結構或通過編程來適合新的應用。
7)簡單經(jīng)濟:編程簡單類同數(shù)控銑床,易培訓員工和維修,使其具有非常好的經(jīng)濟性。
8)壽命長:直角坐標機器人的壽命一般是10年以上,維護好可達40年。
9) 應用范圍廣:可以方便地裝配多種形式和尺寸的手爪,可以勝任許多常見的工作,如焊接、切割,搬運、上下料、包裝、碼垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼和噴涂等任務。
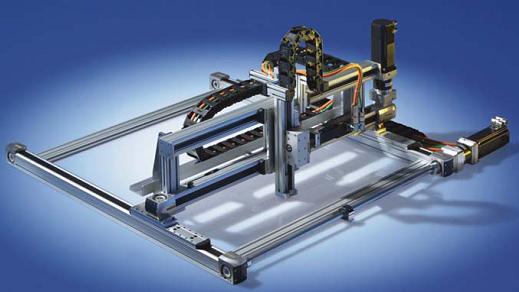
圖1是一個典型的3D直角坐標機器人,它由X軸,Y軸,Z軸及驅(qū)動電機組成。此外一個完整的機器人系統(tǒng)還需要控制系統(tǒng)和手抓。
二、關節(jié)機器人
1、概念:
也稱關節(jié)手臂機器人或關節(jié)機械手臂,有很高的靈活度,通常5~6軸,適合于幾乎任何軌跡或角度的工作。

2、特點:
1) 有很高的自由度,靈活性, 從不同角度不同方位來工作。
2) 速度可達6米/秒,加速度10米/每秒;工作效率高,
3)經(jīng)常在網(wǎng)絡或電視里看到,較為世人所熟悉和接受。
4) 6軸機器人主要應用于汽車點焊,弧焊,裝配(擰螺絲),檢測類這些輕巧類工作。
5)人們開發(fā)了4軸搬運碼垛類機器人。
三、特點及應用分析對比
1、工作空間與承載能力:
1)直角坐標型標準單根長度6m,拼裝后可達到100m;組合成龍門式機器人,其工作空間可以是非常的三維立體空間。單根承載10~200kg,特殊結構可達2400 Kg。
2)關節(jié)型最大工作半徑3m,在有效半徑內(nèi)可以任何角度工作。關節(jié)機器人工作半徑所在的園周內(nèi)要做安全隔離,所以通常占用更大的空間。不適合大距離空間工作,或放置到直線運動單元上。承載能力有幾種規(guī)格5~20Kg可選,但最大1300Kg,這時及其昂貴。
說明:常見的關節(jié)型機器人的工作半徑越大、強度也要大,對于承載能力越強,但為保證其穩(wěn)定的機械結構,造價會非常高。
直角坐標型的龍門框架結構,承載能力強,可無限擴展,穩(wěn)定可靠,造價相對低很多。
2、工作精度
1)直角坐標型:由于結構簡單,重復定位精度0.05mm,絲杠型可達0.01mm,甚至更高。
2)關節(jié)型:重復定位精度0.06mm,輕載荷小半徑0.02mm,重載荷精度0.2mm。
說明:在通常情況下,兩種機器人均可滿足精度要求。其中絲杠型直角坐標機器人更適合對精度要求更加苛刻的行業(yè)。
3、組合方式
1)直角坐標型組合方式多樣,龍門式、懸臂式、壁掛式等,可根據(jù)不同的負載、行程、功能及特殊空間要求,為客戶訂制所需求產(chǎn)品。同時,X、Y、Z三軸基礎上可以擴展旋轉(zhuǎn)軸和翻轉(zhuǎn)軸,構成五自由度和六自由度機器人。
2)關節(jié)型可細分為6自由度機器人、Scara機器人、四連桿機器人,種類相對少,選擇性和靈活性較直角坐標型小很多。
4、機械安裝及維護
1)直角坐標型為模塊化產(chǎn)品,在工廠全部預連接運行,然后拆裝出廠。現(xiàn)場通過螺栓簡單拼裝,調(diào)水平即可電氣調(diào)試,用戶甚至可以自行完成機械安裝。龍門式框架為整個安裝空間,其工作空間也在框架范圍內(nèi)。
模塊化產(chǎn)品,用戶可以自行拆卸、更換或維護,所有機械零件均為通用品,維修維護費用低。
2)關節(jié)型集成化程度高,整體性好,但需要專業(yè)人員進行機械安裝。安裝空間較直角坐標型小,但是其工作空間是其整個工作半徑,工作區(qū)域需要做防護處理,故設備總占地面積不小于直角坐標型。
由于機械化程度高及控制非常復雜,維修和維護必須由廠家或供應商的專業(yè)人員完成(國外進口品牌的維護費用在300元/小時左右),用戶往往面臨兩個問題高價維修或報廢處理。
5、軟件編程操控和維護
1)從電氣系統(tǒng)到上位機直角坐標型都是開放、靈活的,適用任何品牌的PLC、CNC、伺服驅(qū)動系統(tǒng),甚至可以按用戶熟悉品牌選定。編程簡單,用戶可以隨意擴展,操控簡單易操作。
完全的交鑰匙工程,簡單程序問題和硬件故障,客戶可以自行處理,例如更換驅(qū)動電機、PLC等,維護費用低。
2)關機型機器人:軟件系統(tǒng)集成化,庫函數(shù)直接調(diào)用,是其軟件優(yōu)點。但編程和操控必須由供應商通過專業(yè)培訓才能完成(廠家軟件編程費用300元/小時),而且特殊軟件需要收費。
維護和維修完全受制于人,由于品牌互相不兼容,硬件故障必須由供應商或廠家直接提供,非市場通用產(chǎn)品,費用高昂。
6、前期投入成本:不考慮后期維護維修費用,以60Kg負載碼垛機器人為例
直角坐標機器人:25~40萬
關節(jié)機器人:60~80萬
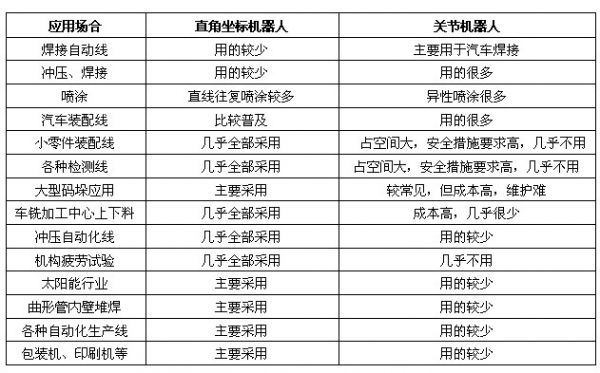
7、根據(jù)國內(nèi)外的應用案例,對不同行業(yè)的應用情況對比如下: